CT803-Firmware: Pour machines d’usinage rotatives
En combinaison avec le motion controller MC800:
Le contrôleur Moteur multi-axes MC800, successeur du fameux contrôleur MC700, se distingue par une bande passante encore plus large et une structure bus de terrain bien plus flexible. Le point remarquable de ce contrôleur réside en l’intégration du contrôleur tandem qui permet d’optimiser les requêtes d’accélaration d’un axe suiveur grâve à la distribution de puissance sur 2 entraînements indépendants.
Le firmware CT803 et le contrôleur MC800 offrent, pour les cisailles rotatives transversales et d'autres applications rotatives, une dynamique élevée, des coupes précises et des cycles de régulation courts.
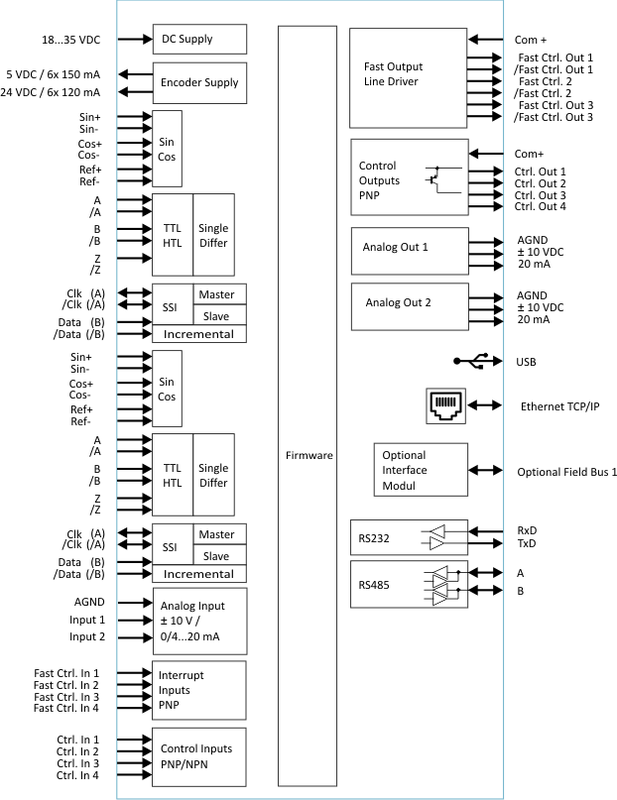
- 2 entrées impulsions au format A, /A, B, /B, Z, /Z [HTL, RS422]
avec une fréquence d'entrée atteignant 2 MHz - 2 entrées codeurs au format SIN+, SIN-, COS+, COS- [1 Vss]
avec une fréquence d'entrée atteignant 400 kHz - 2 entrées SSI au format DATA+, DATA-, CLOCK+, CLOCK- jusqu'à 25 bits,
avec une fréquence SSI de 100 Hz ... 1 MHz - 2 entrées analogiques 14 bits avec facteur d'échelle, ±10 V ou 0/4 ... 20 mA
- 4 entrées de commande pour signaux PNP / NPN [10 ... 30 VDC]
- 4 entrées interruption rapides pour signaux PNP / NPN [10 ... 30 VDC]
- 1 sortie impulsions au format A, /A, B, /B, Z, /Z [RS422]
- 4 sorties de commande à caractéristique Push-Pull, résistantes aux courts-circuits, [ 5 ... 30 VDC]
- 2 sorties analogiques 14 bits avec facteur d'échelle pour ±10 V ou 0/4 ... 20 mA
- Cycle de régulation de position env. 250 µs
- Tension d'alimentation 18 … 35 VDC
- Boîtier compact pour montage sur profilé chapeau 35 mm (selon EN 60715)
- Interfaces embarquées: Ethernet / IP, RS232 / RS485, USB 2.0, CANopen,
Modbus RTU - Interfaces Ethernet en option: EtherCAT, Ethernet / IP, Modbus TCP, Powerlink, PROFINET, SERCOS-III
- Interfaces bus de terrain en option (esclave): CC-Link, DeviceNet, PROFIBUS
- Fonctionne avec tous les entraînements quatre quadrants munis d'un Drive Communication Bus standard
(p. ex. SERCOS-II). Il est possible d'utiliser, en alternative, une entrée de consigne de ±10 V - Ces contrôleurs peuvent se commander au moyen de terminaux de commande externes ou d'IHM via le bus de communication standard de l'usine (p. ex. PROFINET)
- Paramétrage aisé au moyen d'un logiciel utilisateur Windows gratuit


Manuel d‘utilisation CT803 disponible uniquement en anglais
Type de fichier: pdf, La taille du fichier: 1 MB

Manuel d‘utilisation MC800 disponible uniquement en anglais
Type de fichier: pdf, La taille du fichier: 444 KB

Fiche de données MC800
Type de fichier: pdf, La taille du fichier: 116 KB
PROFIBUS (MC800)
Fichier GSD PROFIBUS© pour les produits motrona MC800.
HMSB1811.zip (2 KB)
CAN-Bus (MC800)
Fichier ESD pour les produits CANopen© MC800.
Ci800.zip (9 KB)

Usinage rotatif de matériaux de MC800
Le firmware CT803 et le contrôleur MC800 offrent, pour les cisailles rotatives transversales et d'autres applications rotatives, une dynamique élevée, des coupes précises et des cycles de régulation courts.
Applications typiques : opérations intermittentes ou rotatives comme la coupe, la perforation, l'impression, le scellage, l'application, l'étiquetage, etc.
Comparé au firmware CT703, CT803 sur plateforme MC800 dispose d’un axe supplémentaire pour un rouleau alimentaire avec un réglage « danseur » optionnel. De plus une dynamique sensiblement supérieure est réalisée. Il permet en outre l'adaptation aux systèmes de capteurs et aux architectures de bus de terrain les plus divers.
Ce firmware offre une caractéristique toute particulière: le Tandem Drive Controller intégré, qui permet de répondre aux besoins en termes d'accélération d'un axe suiveur en répartissant la puissance sur deux entraînements indépendants.
Logiciel et clé de licence sur demande.
« Retour à l’aperçu